08. PD Controller Solution
def run(robot, tau_p, tau_d, n=100, speed=1.0):
x_trajectory = []
y_trajectory = []
prev_cte = robot.y
for i in range(n):
cte = robot.y
diff_cte = cte - prev_cte
prev_cte = cte
steer = -tau_p * cte - tau_d * diff_cte
robot.move(steer, speed)
x_trajectory.append(robot.x)
y_trajectory.append(robot.y)
return x_trajectory, y_trajectory
This is very similar to the P controller. We've added the
prev_cte
variable which is assigned to the previous CTE and
diff_cte
, the difference between the current CTE and previous CTE. We then put it all together with the new
tau_d
parameter to calculate the new steering value,
-tau_p * cte - tau_d * diff_cte
.
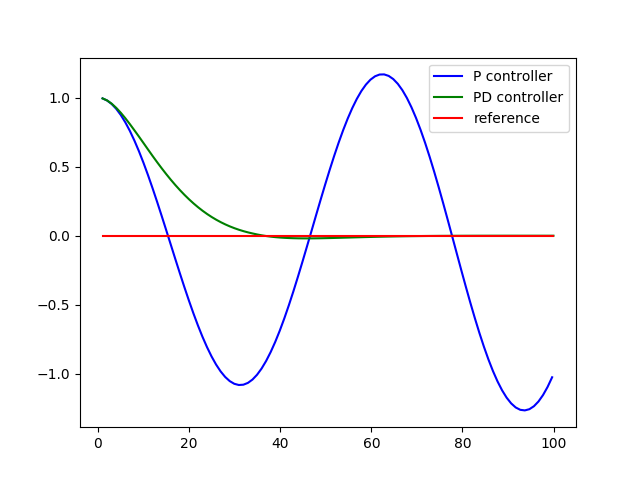
As we can see from the above image the PD controller performs much better!
PD Controller Solution - Artificial Intelligence for Robotics